MSP Explorer Desert Duck
- Salvatore Giglio

- 11 gen 2022
- Tempo di lettura: 4 min
Aggiornamento: 2 feb 2022
Una vettura di pura fantasia, divertente, scattante, bizzarra, che non conosce ostacoli dall'andatura sculettante come quella di un papero. Qui la storia del Desert Duck!

1 - MSP Explorer Desert Duck: ideazione

Il Desert Duck deriva direttamente dal Wolf; la sua creazione è legata alla necessità iniziale di studiare anche un veicolo meno rigido il rispetto alle sollecitazioni assiali longitudinali, cosa questa che portò all'eliminazione di un volume nella parte centrale della carrozza.
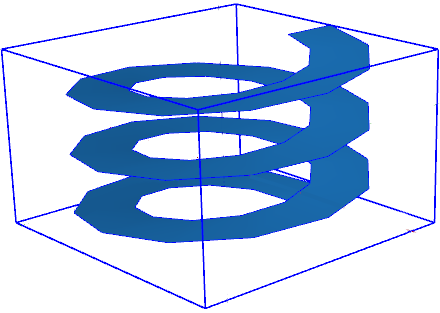
Il collegamento elastico tra testa e coda veicolo è stato affidato a tre grosse molle con asse parallelo a quello longitudinale del mezzo e fissate sulla faccia posteriore interna del telaio motore di testa.
Le sollecitazioni longitudinali subite dal veicolo durante l'avanzamento, come, ad esempio quelle ricevute lungo declivi dal fondo irregolare, sono assorbite dalle tre molle che, a seconda della direzione della sollecitazione, allungano o accorciano dolcemente il veicolo in un rapporto direttamente proporzionale al modulo della forza sollecitante.
Ne risulta una vettura bizzarra e divertente, che si adatta perfettamente a qualunque tipo di tracciato e che ha permesso, sin da subito, evoluzioni impensabili col Wolf.
Una trasposizione di questo modello nella realtà potrebbe avvenire pensando ad un'interconnessione tra i due moduli mediante un sistema elettromagnetico o da un gruppo di quattro cilindri idraulici, entrambi opportunamente gestiti da un PLC.
Il nome Duck → papero deriva proprio dal buffo andamento del prototipo in quelle primissime prove, goffo e sculettante, che mi ricordò il simpatico appellativo dialettale in uso nelle zone più popolari di Napoli con cui spesso si indicano i neonati quando tentano i loro primi passi indossando ingombranti pannolini che li fanno somigliare ad un:
Pàpariello - pà|pa|rì|el|lo - P. pàpariɛll - dial. nap. = giovane oca non ancora in fase riproduttiva

2- MSP Explorer Desert Duck: il prototipo
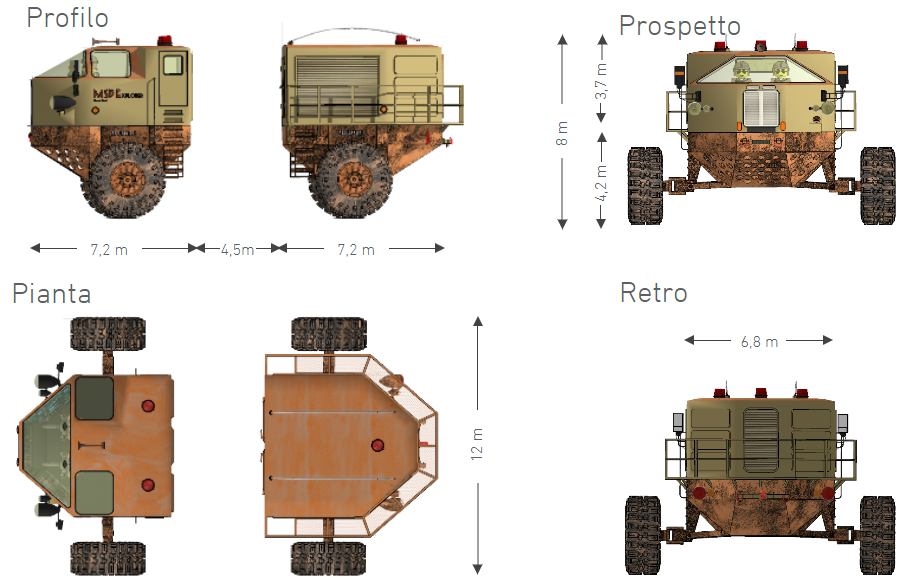
La generosità dimensionale di questo veicolo è stata cercata per realizzare un mezzo imponente in grado di soddisfare pienamente l'esuberanza dei due BPDS block in grado di erogare una potenza di 600 hp (150 hp per asse motore) tramite quattro motori elettrici WHM ( da → Wheel Hub Motor), ossia un sistema di motore elettrico e freno integrati nei mozzi delle ruote del veicolo). La cabina di pilotaggio è quella del Wolf, spartana ed essenziale; il box posteriore ospita le batterie, il sistema frenata rigenerativa, attrezzi e scorta d'acqua potabile. La velocità massima del veicolo in VII è di 210 Km/h. Il peso del prototipo è di 4 tonnellate, mentre la massa frenata è di 3,1 tonnellate.

3 - MSP Explorer Desert Duck: test del prototipo
Il test sul circuito di rally che, anche se virtuale, è pieno di difficoltà da superare. Sulla ziggurat il Duck se l'è cavata benissimo grazie all'elevata maneggevolezza, ma tutto il percorso testimonia l'agilità di questo buffo mezzo e il piglio deciso con cui affronta gli ostacoli. Alla guida i due Minifigures modellati da woodlake@iinet.net.au.
4 - MSP Explorer Desert Duck: progetto
Dopo le prove più che soddisfacenti sul circuito di rally del prototipo decisi di dare al modello del Duck un aspetto più marziale, così come avevo già fatto col Wolf. Grazie all'esportabilità di gruppi e componenti di SketchUp prelevai gli elementi utili all'elaborazione e con Paint.NET e GIMP preparai delle texture ad hoc per il rivestimento.
Il lavoro di abbellimento durò una settimana circa e con il nuovo allestimento mi dedicai ad affinare le prestazioni dei giunti Engine e di quelli cerniera, riguardando anche il peso dei vari gruppi costituenti il veicolo nonché il grip degli pneumatici. A lavoro finito mi sentì soddisfatto del risultato ottenuto: il Pàpariello sfrecciava gioiosamente su Fobos.
6 - MSP Explorer Desert Duck: particolari costruttivi

Ogni veicolo animato con MS Physics richiede un'idea di progetto ben precisa: prima di modellare un veicolo bisogna immaginarselo in movimento nel contesto di un determinato scenario. Una cosa è lo sviluppo di una vettura destinata ad una pista o ad una strada dal fondo regolare, e un'altra è concepirla per farla scorrazzare su dune, dossi, scalinate, ecc.
Nell'immagine di cui sopra l'esploso del veicolo mostra i componenti funzionali del Duck nonché l'ingrandimento di una delle 32 hinge che permettono l'articolazione ammortizzata dei quattro braccetti. I blocchi motore sono resi solidali con l'abitacolo e con il vano batterie/bagagliaio mediante dei giunti fissi.
La staffa della ruota è collegata alla staffa a C del mozzo mediante dei giunti servomotore che permettono la sterzata. Infine le ruote motrici sono collegate alle relative staffe a C mediante quattro giunti Engine.
7 - MSP Explorer Desert Duck: prova rally
Pubblico questo video della prova rally del Desert Duck per far capire al visitatore le potenzialità di questa vettura virtuale in termini di velocità e maneggevolezza; il restyling ha trasformato il veicolo in un'unità leggera per l'esplorazione, particolarmente adatta a territori desertici. Per questi motivi il modello è diventato parte di un FTP dedicato a Fobos, una delle lune marziane.
8 - MSP Explorer Desert Duck: script Ruby
Mi sia consentito definire questo modesto lavoro di programmazione, con tutti i suoi limiti, come una sorta di Bignami di MS Physics per i veicoli, in quanto in esso compaiono i principali assunti Ruby per:
la gestione della velocità attraverso un innovativo script di mia concezione simulante un cambio sequenziale a 7 rapporti di tipo quick shifter in grado, cioè, di smorzare ampiamente le sollecitazioni del motore durante il passaggio di marcia mantenendolo sempre in trazione;
gestione della telecamera su due POV distinti, alle spalle del veicolo e dall'abitacolo;
gestione degli STOP;
dashboard testuale a schermo, riportante feedback inerenti la marcia inserita, la velocità in Km/h, il punteggio effettuato e le carte ancora in gioco;
creazione degli effetti particellari applicata alle ruote della vettura per simulare la polvere sollevata durante gli spostamenti.
Ho reso possibile la copia dello script da questa finestra a sinistra; ovviamente sta poi a voi adattarla alle vostre esigenze.
9 - MSP Explorer Desert Duck: modello 3D
Cliccando sull'anteprima, dopo qualche istante, potrete valutare il modello in vista 3D, senza andare direttamente sulla Warehouse. In caso decidiate di scaricarlo dovrete cliccare sul logo della Warehouse in basso a destra sul visualizzatore.
Il modello consta di:
62 materiali;
56.457 poligoni;
28MB di peso;
contiene script Ruby (cabina di pilotaggio veicolo)


Commenti